Description
A compact self-contained bench mounting d.c. servo apparatus designed to allow students at all academic levels to investigate basic and advanced principles of control. In particular, the CE110 deals with control issues relating to position and speed control in servo systems.
The CE110 Servo Trainer shows d.c. servo position and speed control systems using typical industrial techniques. It has a d.c. servomotor, a d.c. generator and a flywheel mounted on a common shaft.
Analogue 0 to ±10 V control signals vary the servomotor shaft speed in either direction. An optical sensor measures the speed and shows it on a panel-mounted digital meter. The d.c. generator statically or dynamically loads the servomotor.
An electric clutch connects or disconnects the shaft to a 30:1 reduction gearbox for position control studies. A manual control allows the user to set a position control setpoint. To adjust the shaft inertia, the CE110 comes with two extra interchangeable inertia discs (flywheels).
For advanced experiments, the Servo Trainer includes extra ‘block’-type circuits that can add non-linear and fully adjustable effects of:
- Deadzone or ‘deadband’
- Anti-deadzone
- Hysteresis
- Saturation
These blocks are important in studies of servo systems because they mimic problems that happen in real applications.
Key features:
- Self-contained and compact bench-mounting unit for basic control of speed, with advanced studies of nonlinear effects of hysteresis, dead-zone and saturation
- Shows the problems of speed and position control of a servomotor under different loads
- Mimics industrial, transport and aeronautical problems – with realistic results
- All inputs and outputs buffered for connection to TecQuipment’s optional controllers or other suitable controllers
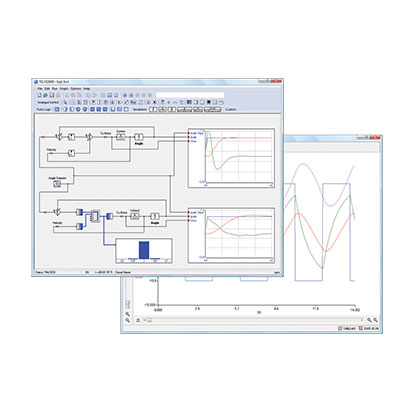
- Front panel includes a mimic diagram of the process so that students can see what they are controlling
Learning outcomes:
- Basic tests and transducer calibration
- Response calculation and measurement
- Proportional and proportional plus integral control of servo-system speed
- Disturbance canceling and feedforward control
- Angular position control: proportional control and velocity feedback
- Angular position control and the influence of non-linearities
- Non-linear system characteristics