We are excited to share that three PASCO products have been chosen as Best of STEM Winners!
Educators Pick Best of STEM is a program designed to rank and award outstanding innovations in STEM education with educators as the judges. Winners are chosen through an aggregate vote based on the criteria for the product category.
This year, PASCO submitted three entries which all won their category! Read about each of them below, and also check out the press release by GlobeNewswire here featuring PASCO Academy and our Meter Stick Optics Complete System: Science Educators Name PASCO Scientific as Best of STEM in Two Categories.
PASCO Academy | Best of STEM: Video-Based Learning
PASCO Academy is a comprehensive library of digital hands-on resources for students both inside and outside the classroom. There are three versions: Physics Academy, Chemistry Academy, and Biology Academy.
PASCO Academy is designed to do some of the heavy lifting for science educators by providing digital curriculum, including activities and resources, that integrates with existing classroom lessons. With PASCO Academy, educators have access to a plethora of distance learning curriculum, virtual labs, data sets, and on-demand PD, enabling them to pick and choose which resources to utilize.
PASCO Academy supports student learning by having them not only study science, but also do science: Students gather their own data, conduct data analysis, and use downloadable resources like instructional videos to develop and support their conclusions. They can even share their collected data to multiple devices (or stream it live!) to collaborate with their peers, as scientists do.
The PASCO Academy provides distance learning video segments, including a weekly overview video, a virtual lab investigation with corresponding student activities, and a follow-up video that ties the week’s learning objectives together. Registered educators have access to the Academy Portal, where they can access a library of distance learning videos, student labs, sample data files, links to relevant information within the included Essential curriculum, and more.
E-learning, hybrid classes, student and teacher absences, and short class times can limit the amount of quality hands-on learning that science students are exposed to. PASCO Academy is comprehensive enough that you can have your substitute teacher run the lab, keeping your class schedule on track when you can’t be there.
Meter Stick Optics Complete System | Best of STEM: Physics
PASCO’s Meter Stick Optics Complete System encourages student observation, measurement, and analysis of optics, all in a compact and simple system.
Component holders easily attach to the meter stick and include an indicator window so students can accurately measure their position. Lenses are built into cases with holding tabs to prevent fingerprints and add durability when students interchange them between holders. The system includes a bright, rechargeable light source that can easily be seen in a lit classroom, and the viewing screens are designed so the projected image is bright and clear.
The system’s compact and durable design allows students to quickly and accurately maneuver components, making multiple investigations possible in the span of one class period.
Coding with Vehicle Sensor Technologies Kit | Trailblazer Award: Cross-Curricular Coding
The //code.Node is a revolutionary device that uses Blockly, sensors, and feedback to teach students coding skills and data literacy. The pocket-size coding solution includes encodable sensors for light, motion, sound, and magnetic fields, as well as a speaker, RGB light, and 5×5 LED array. Using PASCO software and the //code.Node, students can create custom experiments that range from simple data collection to advanced, measurement-based sensory feedback. As they execute their code, students collect real-time data and visual feedback that helps them improve with each activity.
The Coding with Vehicle Sensor Technologies Kit is geared towards new coders with a simple wireless design that uses block-based coding, allowing students to focus on the basics of programming without worrying about syntax. The //code.Node Cart has a spinning magnet on its wheels that the attachable //code.Node detects, allowing students to determine the cart’s distance and velocity. Five thorough investigations are included in the kit, featuring video lessons and student worksheets, all accessible through a convenient digital flipbook.
The //code.Node lets students go beyond computer animations to controlling output devices like speakers and LED lights, and the included activities integrate live data collection and analysis so students are challenged to observe, question, and retest their theories.



























 After just one week of being inside the Greenhouse, three out of six seeds germinated and sprouted! As a couple more weeks went by, two more seeds sprouted. Unfortunately, one seed (on the T side) did not germinate. Overall totaling three plants on the U side, two on the T side. At this point, we hypothesized which of the seeds had been to space and which had not, and wrote down our predictions to compare to the results later on. You can share your predictions in the survey at the bottom of this post, and find out which seeds were the space seeds!
After just one week of being inside the Greenhouse, three out of six seeds germinated and sprouted! As a couple more weeks went by, two more seeds sprouted. Unfortunately, one seed (on the T side) did not germinate. Overall totaling three plants on the U side, two on the T side. At this point, we hypothesized which of the seeds had been to space and which had not, and wrote down our predictions to compare to the results later on. You can share your predictions in the survey at the bottom of this post, and find out which seeds were the space seeds!

 integrating coding into the curriculum.
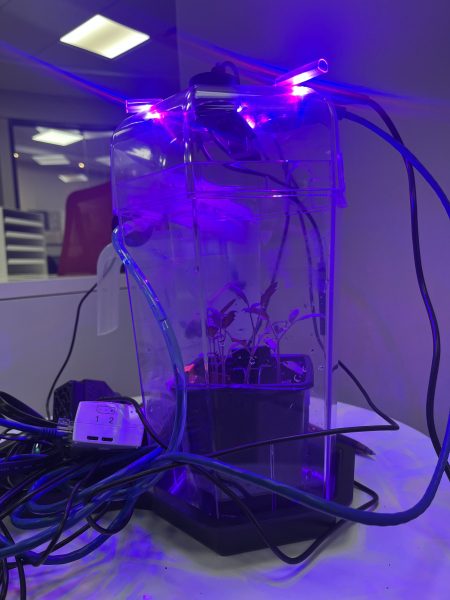
integrating coding into the curriculum. In our experience with the Greenhouse Sense & Control Kit, we decided to design an environment for a Ring of Fire Pepper Plant. We had to research conditions that would be essential for the plant to grow. This included factors such as relative humidity, temperature, soil moisture, hours of sunlight, and how much water it needs each week. The Greenhouse Sense & Control kit provides the materials for students to design the greenhouse for the plants’ needs. Through code, you can program a fan, grow light, and irrigation system to provide the optimal conditions for your plant. This teaches students how changes due to soil, water, air, and temperature in an ecosystem can affect a plant’s growth in good and bad ways. The activities provided by this kit allow students to learn about ecosystem sustainability firsthand and in real-time.
In our experience with the Greenhouse Sense & Control Kit, we decided to design an environment for a Ring of Fire Pepper Plant. We had to research conditions that would be essential for the plant to grow. This included factors such as relative humidity, temperature, soil moisture, hours of sunlight, and how much water it needs each week. The Greenhouse Sense & Control kit provides the materials for students to design the greenhouse for the plants’ needs. Through code, you can program a fan, grow light, and irrigation system to provide the optimal conditions for your plant. This teaches students how changes due to soil, water, air, and temperature in an ecosystem can affect a plant’s growth in good and bad ways. The activities provided by this kit allow students to learn about ecosystem sustainability firsthand and in real-time.
