Our First Experience with the PASCObot
Coming out of our second year of Engineering at the University of Guelph, we have a newly developed appreciation for working with laboratory equipment. Having missed out on much of our in person labs throughout first year due to the pandemic, we have truly enjoyed being able to interact with the lab equipment this school year in our Fluid Mechanics and Material Science Courses.
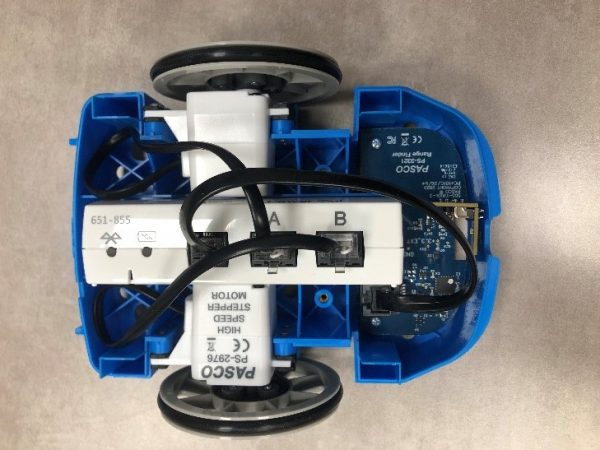
This past week, we got to unbox and assemble PASCO’s new PASCObot Sense and Control Kit, giving us an introduction to robotics and simple block coding. We started by assembling the PASCObot body using the instructions. The assembly consisted of screwing on the High Speed Stepper Motors and the wheels. This was followed by plugging in the wires of the motors to the //control.node, screwing in the hold-down and the top frame as shown. The instructions were easy to follow and the box contained everything needed including the screwdriver. Within the kit, there are multiple attachments designed for different applications and activities.
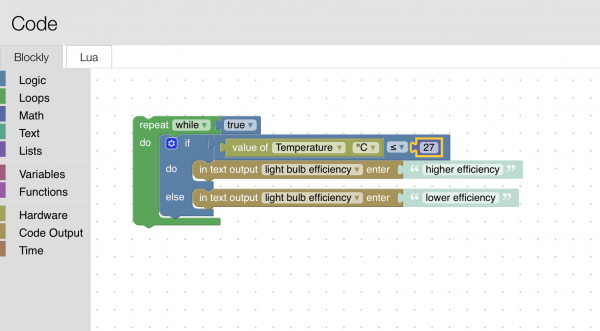
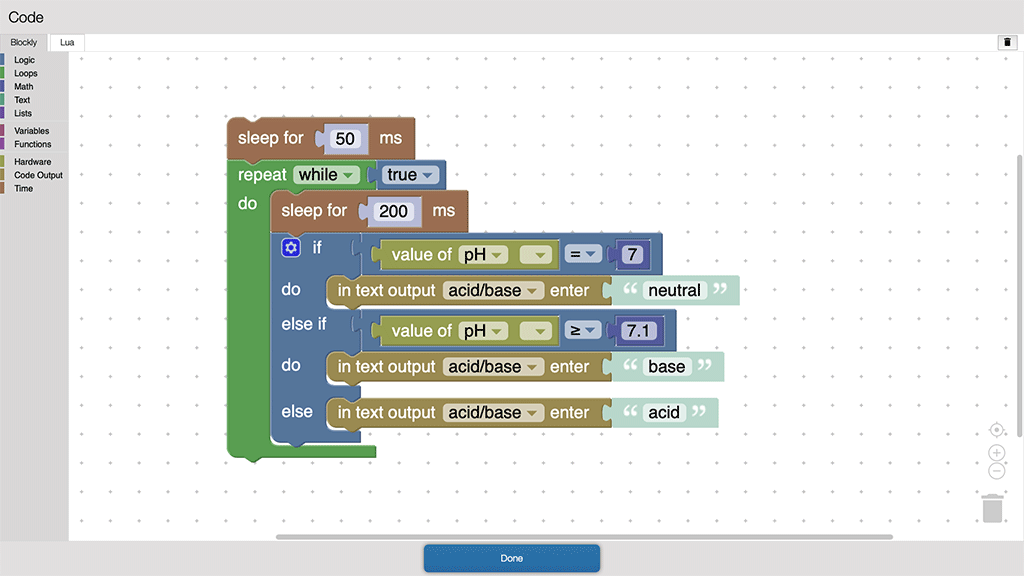
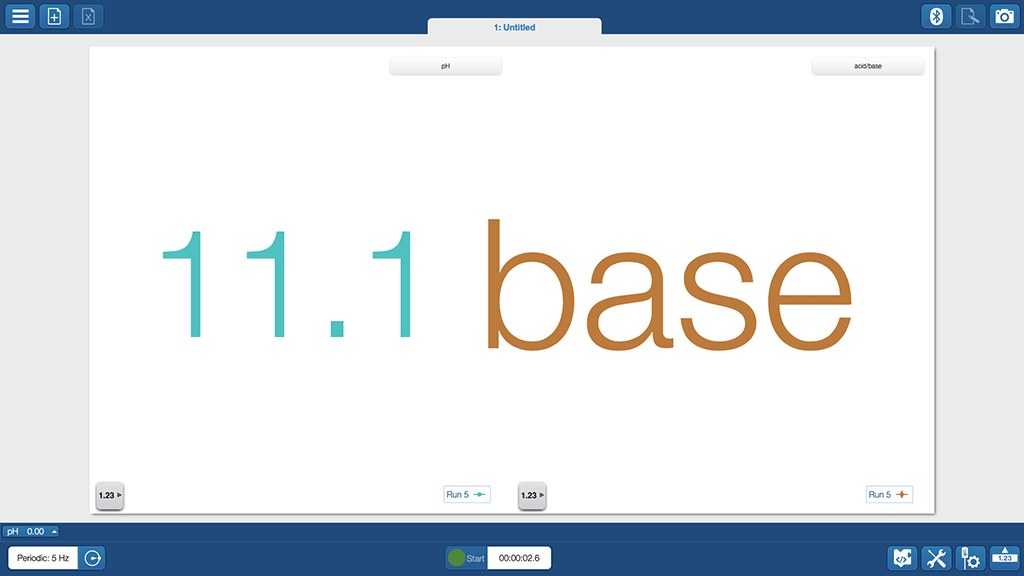
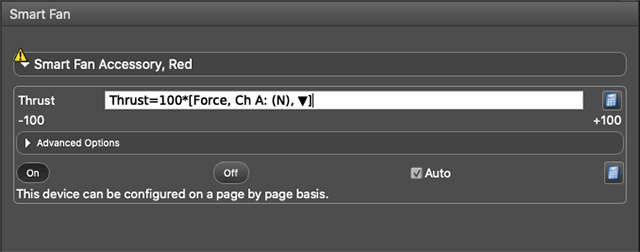
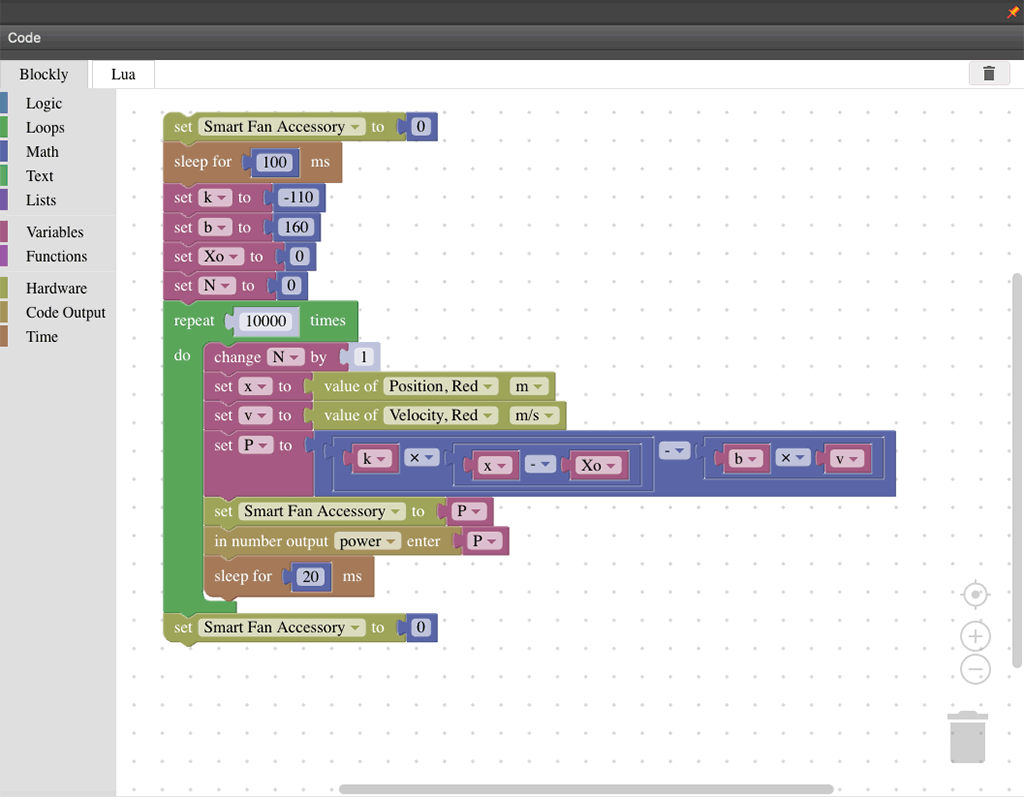
 The first attachment we tested was the Gripper, shown in the photo on the left, which consists of two servo motors which attached to the //control.node. These motors allowed the Gripper to open and close its jaws as well as angle them up or down according to the given code. This was an interesting experiment that demonstrated several experimental applications of the PASCObot. For instance, setting up the code was quite simple. In the instructions, it explains how to get started with SPARKvue. The //control.node connects to the software using Bluetooth. The code is presented in a block-like manner, each instruction being in the shape of a puzzle piece. All you have to do is drag one of the puzzle pieces from the Code tool or import them from the PASCO code library, connecting them from top to bottom in the order you want them to function. Each block/puzzle piece states exactly what you want it to do. For example, to make the PASCObot move forward 50 cm, you would select the block “moveADistance with: _ cm” from the PASCO code library and type 50. Students may need a demonstration on how to navigate the code tool however, we were able to figure it out quickly, without having any previous experience with SPARKvue.
The first attachment we tested was the Gripper, shown in the photo on the left, which consists of two servo motors which attached to the //control.node. These motors allowed the Gripper to open and close its jaws as well as angle them up or down according to the given code. This was an interesting experiment that demonstrated several experimental applications of the PASCObot. For instance, setting up the code was quite simple. In the instructions, it explains how to get started with SPARKvue. The //control.node connects to the software using Bluetooth. The code is presented in a block-like manner, each instruction being in the shape of a puzzle piece. All you have to do is drag one of the puzzle pieces from the Code tool or import them from the PASCO code library, connecting them from top to bottom in the order you want them to function. Each block/puzzle piece states exactly what you want it to do. For example, to make the PASCObot move forward 50 cm, you would select the block “moveADistance with: _ cm” from the PASCO code library and type 50. Students may need a demonstration on how to navigate the code tool however, we were able to figure it out quickly, without having any previous experience with SPARKvue.
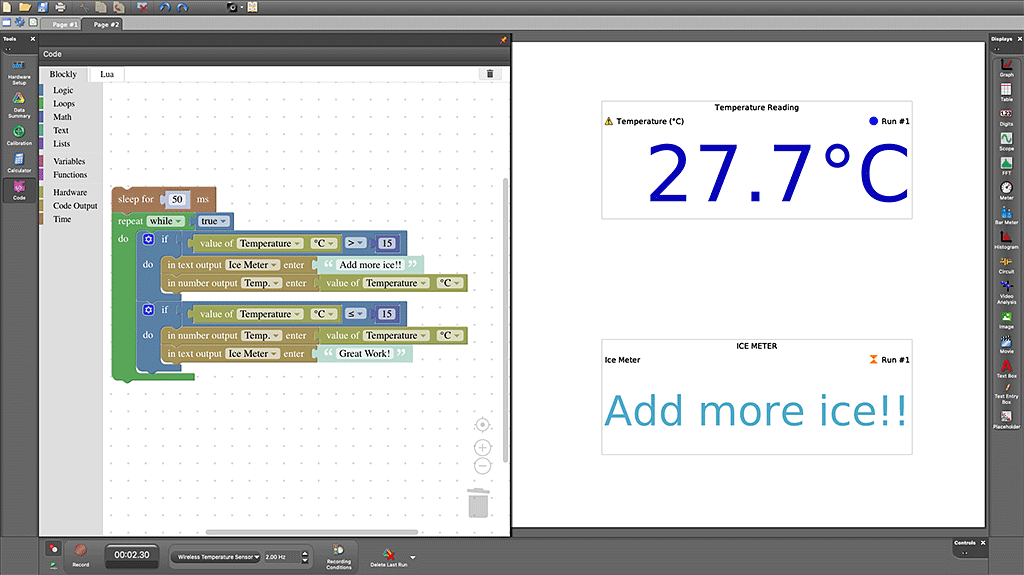
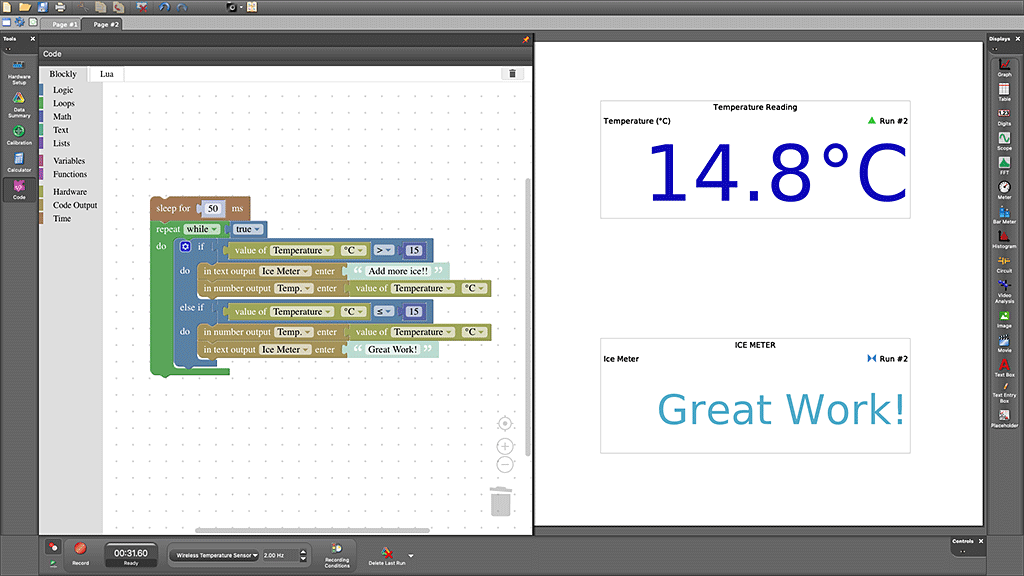
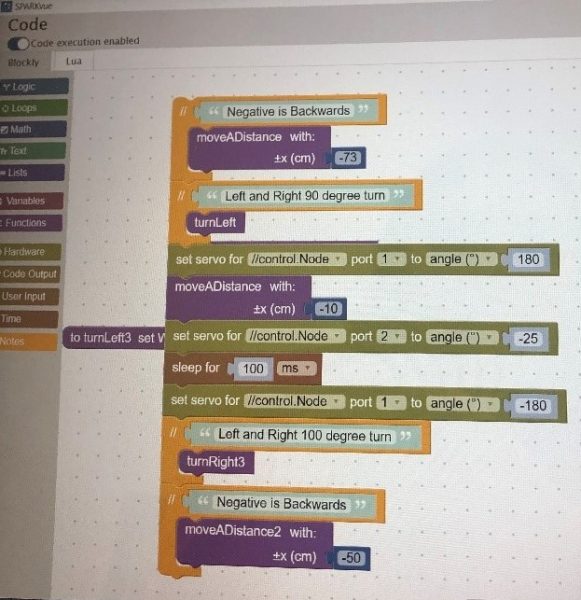 This inspired us to film a short clip in which the PASCObot would move a certain distance, turn left, grab a cup of water, turn right, and bring this cup to us. We started by measuring and marking a course then coding the robot using the measurements taken, as shown in the image on the right. We were able to successfully complete this task without spilling any water, and this allowed us to become more familiar with the system.
This inspired us to film a short clip in which the PASCObot would move a certain distance, turn left, grab a cup of water, turn right, and bring this cup to us. We started by measuring and marking a course then coding the robot using the measurements taken, as shown in the image on the right. We were able to successfully complete this task without spilling any water, and this allowed us to become more familiar with the system.
 We then moved on to using the Range Finder Module, shown in the image on the left. This accessory was attached in the front of the PASCObot with two screws. A wire was then used to connect the Range Finder Module to the //control.node. The Range Finder Module uses infrared light to detect the distance from the PASCObot to objects. We followed the “Roving with Sight with the PASCObot” experiment from the PASCO Experiment Library and used the sample code. The code allowed the PASCObot to move on its own, avoiding objects, reacting to its surroundings, and maneuvering around the office floor independently. We found working with the PASCObot super cool and we are excited to try out more experiments.
We then moved on to using the Range Finder Module, shown in the image on the left. This accessory was attached in the front of the PASCObot with two screws. A wire was then used to connect the Range Finder Module to the //control.node. The Range Finder Module uses infrared light to detect the distance from the PASCObot to objects. We followed the “Roving with Sight with the PASCObot” experiment from the PASCO Experiment Library and used the sample code. The code allowed the PASCObot to move on its own, avoiding objects, reacting to its surroundings, and maneuvering around the office floor independently. We found working with the PASCObot super cool and we are excited to try out more experiments.